
Научно-технический прогресс не стоит на месте и, как результат, мы наблюдаем бурное развитие современной беспилотной летательной техники. И уже сложно представить наш стремительно меняющийся мир без беспилотных летательных аппаратов (БпЛА), а их роль в жизни общества сложно переоценить. Вместе с тем, эффективное и надежное применение БпЛА требует, в том числе, оснащения наземных пунктов управления подходящим высокопроизводительным и высоконадежным оборудованием.

Основным элементом, с которым работают операторы БпЛА, являются рабочие места операторов (РМО). С одной стороны, РМО должны быть компактными, чтобы обеспечивать возможность их установки в мобильные пункты управления. С другой стороны, РМО должны обеспечивать удобство и комфорт работы оператора. Так, в некоторых случаях поставленная задача требует непрерывной работы в течение суток и более.
И, конечно же, во время выполнения поставленной задачи нельзя допустить сбоев и отказов не только на управляемом БпЛА, но и каждой из наземных систем управления, включая РМО.
Для увеличения полезного используемого объема и возможности размещения нескольких РМО в ограниченном пространстве передвижных пунктов управления, в таком рабочем месте часто используют схему с вертикальным расположением двух и более экранов.
Алгоритмическая сложность выполняемых задач непрерывно возрастает вместе с количеством применяемых вычислителей в комплексе, при этом надо решать задачи организации рабочего места оператора, отвечающего современным требованиям быстродействия, надежности, защищенности от несанкционированного доступа (НСД) и эргономики.


РМО предназначено для решения задач автоматизированного управления взлетом и посадкой при эксплуатации, а также при обслуживании БпЛА для обеспечения интерфейса взаимодействия оператора как с наземными аэродромными техническими средствами, так и с бортовыми системами БпЛА.
РМО состоит из:
– основной клавиатуры для набора текста;
– панели с функциональными клавишами управления системами БпЛА;
– джойстика управления системами БпЛА с двумя степенями свободы (клавиши – опционально) с системой помощи предплечью;
– «шайбы» управления поворотным шасси БпЛА;
– панели управления РМО.
Органы управления и ввода информации монтируются в стол. При этом следует отметить, что конструкция РМО сделана с учетом возможности быстрой замены каждой составной части.
На лицевую панель РМО также выведено два USB-порта с контролем стыковки для подключения манипулятора и внешних дополнительных устройств.

Учитывая большую массу рабочего места (до 170 кг) и возможность его установки в транспортируемые/возимые пункты управления (например, в составе кузов-контейнеров), РМО и подвесной шкаф оснащены демпфирующими виброопорами и их блокираторами.
В процессе разработки был учтен ряд особенностей, с которыми приходится регулярно сталкиваться при размещении РМО в составе пунктов управления.
Так, система электроснабжения (СЭС) должна обеспечивать электропитание всех основных потребителей. Для представленного РМО такими потребителями являются панельная ЭВМ, монитор, сервер, коммутатор сети Ethernet с номинальным напряжением электросети 27 В. Для сокращения количества кабелей и значительного снижения их общей массы в состав РМО введен коммутатор питания (Рис. 3), который обеспечивает передачу питания от бортовой сети постоянного тока системы электроснабжения к входящим в РМО составным частям. Дополнительно коммутатор питания выполняет следующие функции:
Учитывая, что в пунктах управления может размещаться несколько РМО, коммутатор питания ко всему прочему имеет сквозные связи, рассчитанные на прямое последовательное подключение двух коммутаторов питания различных РМО между собой, что также позволяет значительно оптимизировать силовую кабельную сеть пункта управления.

Также потребовалась разработка сборной конструкции, пригодной для проноса в пункты управления через стандартные двери. Для этого РМО выполнен в виде трех крупногабаритных конструкций: стола, надстройки и навесного шкафа, закрепляемых на этапе монтажа. Все электронные блоки и кабели крепятся к РМО также в процессе монтажа в составе пункта управления.
В процессе изготовления РМО встал вопрос добавления «шайбы» управления с осевым вращением на 360° без упоров (Рис. 4). Благодаря выбранной структуре и конструктивным особенностям рабочего места, добавить новый орган управления системой БпЛА в состав изделия и изменить лицевые панели не составило большого труда.
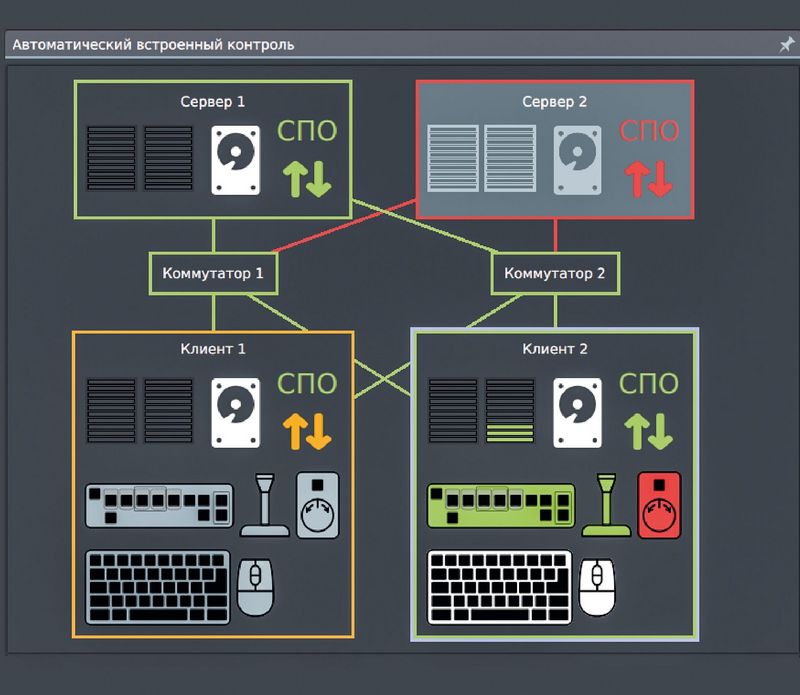
С учетом общей сложности РМО, большого количества связанных между собой электронных блоков, важные составляющие при эксплуатации РМО – встроенные средства контроля (ВСК). В РМО реализована ВСК в составе панельной ЭВМ и монитора. Панель системы представлена на Рис. 5. ВСК автоматически контролирует более 60 параметров и регистрирует в энергонезависимую память события и состояние параметров в случае детектирования нештатных ситуаций. Доступ к телеметрической информации, поступающей от ВСК, возможен из операционной системы панельной ЭВМ через внутреннюю шину SMBUS либо через внешний отладочный интерфейс USB.
Высокоинформативная ВСК позволяет проводить диагностику, локализацию неисправности и оперативную замену неисправных узлов.

Если ВСК отвечает за контроль и диагностику, то за выполнение основных функциональных задач отвечает специальное программное обеспечение (СПО), которое устанавливается и функционирует на вычислительных средствах РМО. СПО предназначено для автоматизированного решения задач, связанных с планированием полета, управлением и контролем состояния БпЛА и оборудования наземного пункта управления.
С помощью СПО проводятся подготовка к работе, настройка, контроль средств и терминалов связи, наземных систем, предварительная настройка конфигурационных параметров БпЛА, которые сохраняются в БпЛА и используются в процессе эксплуатации. Кроме того, важно учитывать полномочия операторов при предоставлении им доступа к различным функциям управления БпЛА. Такое разграничение доступа выполняет тоже СПО. Оператор входит в систему под своей учетной записью и может выполнять действия в рамках полномочий, определенных свойствами учетной записи.
Для эффективного планирования полетов, контроля маршрута БпЛА, удобства ввода исходных данных, рабочие места оператора должны быть обеспечены цифровой картографией. Инструментарий для работы с цифровыми картами, реализованный в СПО, включает весь «джентльменский набор»:
СПО предоставляет набор функциональных средств для подготовки и загрузки в БпЛА плана полета:
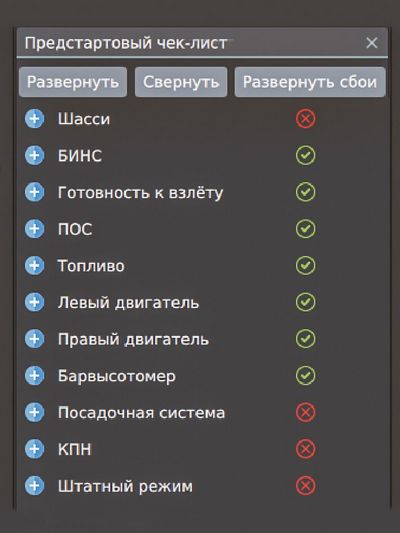
В СПО реализована возможность предоставления оператору карт контрольных предстартовых проверок (предстартовый чек-лист, Рис. 6).
Во время взлета, полета и посадки СПО обеспечивает отображение текущих параметров полета, маршрута полета, полетных и навигационных данных, состояния бортовых и целевых систем по поступающей телеметрической информации.

Например, в дополнительной панели режима «Полет» (Рис. 7) отображается информация, поступающая от различных датчиков бортовых систем БпЛА – топливной, охлаждающей, гидравлической, электроснабжения и др.
А в панели «Индикатор полетных данных» (Рис. 8) отображаются сведения по скорости, курсу, крену, тангажу, высоте, параметрам погодных условий и т.п.
В процессе полета обеспечивается возможность оперативного управления БпЛА (изменение режимов полета и режимов работы бортового оборудования). Также в СПО реализована возможность просмотра видеоинформации, поступающей с оптико-электронных средств.
СПО обеспечивает возможность управления БпЛА в автоматическом и полуавтоматическом режимах. В автоматическом режиме система управления БпЛА выполняет взлет, полет по маршруту, посадку, возврат, полет по обратному маршруту без непосредственного участия оператора в управлении БпЛА. В полуавтоматическом режиме оператор задает курс, скорость и высоту полета, а система управления БпЛА их поддерживает. В случае возникновения сбоев в работе БпЛА, СПО оперативно информирует об этом оператора. СПО поддерживает одновременную работу с несколькими БпЛА.
В процессе работы с БпЛА могут возникать нештатные ситуации, причиной возникновения которых могут быть отказы оборудования, влияние внешних факторов, а также некорректные действия операторов. Для обеспечения возможности разбора таких ситуаций СПО обеспечивает регистрацию телеметрической информации и действий операторов. В процессе работы производится регистрация данных полета БпЛА в электронный журнал, а также данных объективного контроля действий операторов (запись видео с экрана монитора, регистрация событий устройств ввода), синхронизированных с записями электронного журнала. После завершения работы с БпЛА СПО обеспечивает возможность воспроизведения полета на основании зафиксированных данных в электронном журнале по результатам полета. Также предоставляется возможность автоматизированного формирования отчетных документов по результатам работы и выгрузки электронных журналов и видеоданных на внешний электронный носитель информации для последующего просмотра на ПК, ноутбуках и иных средствах.
СПО функционирует под управлением ОС Astra Linux и построено на основе клиент-серверной архитектуры, т.е. состоит из клиентского и серверного программных модулей. Информационно-техническое взаимодействие между сервером и клиентом осуществляется посредством сети Ethernet.

Клиентский программный модуль СПО функционирует на РМО и обеспечивает человеко-машинное взаимодействие. Серверный программный модуль функционирует на сервере и состоит из следующих функциональных модулей:
Обмен сообщениями между задачами, решаемыми клиентским и серверным модулями, реализовывается с помощью специальной системы обмена сообщениями. Основной задачей системы обмена сообщениями является реализация унифицированного механизма управления обменами и маскирование особенностей протоколов обмена от прикладных задач, которые используют данные, подлежащие обмену. В каждом узле для каждой задачи определяются два набора событий. Один набор определяет события, которые задача сигнализирует для своих потребителей, другой – интересующие ее события, на которые производится подписка. На одно сообщение от задачи может подписаться несколько получателей.
В системах управления БпЛА важно обеспечить надежность и отказоустойчивость каналов передачи данных. Для обеспечения отказоустойчивости сетевых адаптеров и линий связи Ethernet применяется их агрегирование. Данный подход основывается на использовании нескольких сетевых интерфейсов в режиме «горячего резерва» – один сетевой интерфейс находится в активном состоянии, остальные – в режиме ожидания. Агрегирование и резервирование наглядно изображены на Рис. 5. В случае выхода из строя активного сетевого интерфейса, на замену подключается другой. Реализация данной технологии в ОС Astra Linux обеспечивается путем включения и настройки функционала bonding. Данный функционал позволяет объединять несколько физических сетевых интерфейсов в один общий виртуальный сетевой интерфейс. Управление физическими сетевыми интерфейсами и переключение режимов их работы производятся на уровне ядра операционной системы.

Реализованная в настоящем СПО распределенная архитектура имеет следующие преимущества:
Ключевые преимущества рассмотренного РМО, которые хотелось бы выделить, это:
– эргономичные углы наклонов рабочих поверхностей;
– два больших широкоформатных экрана;
– подставки для рук и ног, снижающие нагрузку на них при длительной работе;
– полностью пассивная система охлаждения, исключающая шумы вентиляторов при работе комплекса;
Применение распределенной архитектуры, как с точки зрения аппаратуры РМО, так и с точки зрения СПО, а также применение системы разграничения прав доступа и гибкого графического интерфейса пользователя обеспечивают унификацию РМО, взаимозаменяемость нескольких РМО, работающих в паре, и существенное снижение затрат на масштабирование системы.
В результате использования указанного подхода РМО обладает следующими отличительными качествами:
Применение для сопряжения с внешними абонентами и системами БпЛА исключительно сети Ethernet 10/100/1000BASE-T и распределенная архитектура СПО дают существенное преимущество в части унификации и модернизационной пригодности представления и обработки данных на программном уровне. Независимость РМО от набора внутренних интерфейсных связей наземных систем и подсистем БпЛА обеспечивает высокую модернизационную пригодность РМО, а СПО может быть относительно легко и быстро модернизировано для применения с различными БпЛА и прочими робототехническими комплексами.
В части органов управления РМО также применен унифицированный подход – все органы управления подключаются к панельной ЭВМ по USB-интерфейсам на уровне операционной системы и программного обеспечения. Все они определяются как стандартные HID-устройства: клавиатура, джойстик. Такой подход позволяет быстро вести отладку и доработку программного обеспечения под требования заказчика даже в условиях отсутствия реальной аппаратуры.
Конструкция РМО позволяет, в случае необходимости, изымать составные части из каркаса для их замены/модификации/ремонта без полной разборки конструкции.
Опыт добавления в состав РМО «шайбы» управления с осевым вращением наглядно показывает большие возможности РМО по модернизации, добавлению или замене органов управления. Так, при незначительных доработках РМО может использоваться для выполнения боевых и специальных задач с управлением основной нагрузкой БпЛА.
В АО «НТЦ ЭЛИНС» непрерывно развивается научно-производственная база, повышается и расширяется компетенция в области проектирования высокопроизводительных систем и комплексов. Накопленные в этой сфере знания и наработанный задел в области проектирования рабочих мест операторов и разработки специального программного обеспечения позволяют создавать программно-аппаратные комплексы на базе РМО со значительными требованиями к производительности, с соблюдением всех необходимых конструктивных требований и норм, предъявляемых к ним как к изделиям, применяемым в образцах вооружений, военной и специальной техники.
