
Наверняка при словах «управление робототехническим комплексом» у большинства людей первая ассоциация будет связана с компактными карманными пультами с джойстиками, удобно ложащимися в ладони. Между тем бурное развитие робототехнических комплексов различного назначения и их усложнение, увеличение количества решаемых задач требует наличия полнофункциональных средств и аппаратуры для дистанционного управления.
В зависимости от типов робототехнических комплексов и решаемых ими задач управление может осуществляться: как по кабельному соединению, так и по радиоканалу; как в полевых условиях, так и в стационарных; как ручное (автоматизированное), так и полуавтоматическое или даже автоматическое.

В арсенале изделий и программного обеспечения разработки АО «НТЦ ЭЛИНС» имеются решения, проверенные практическим опытом, для наиболее востребованных в настоящее время типов робототехнических комплексов.
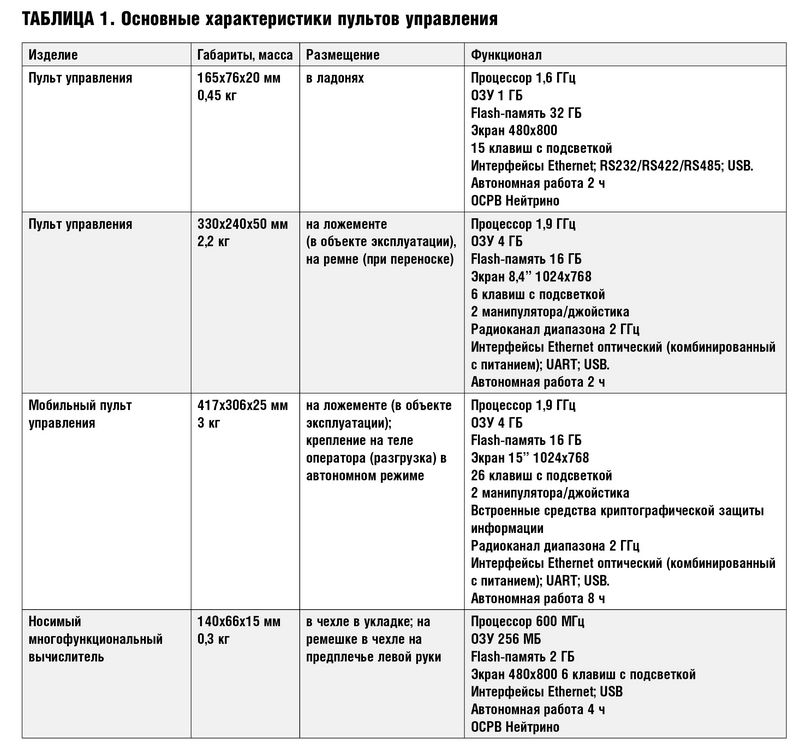
Во-первых, это проводное и беспроводное управление оптоэлектронной аппаратурой, а также полезной нагрузкой как из кабины техники, так и в отдалении, на безопасном расстоянии от нее, с помощью выносных пультов управления (Фото 3). Для малых узкоспециализированных робототехнических средств могут подойти в том числе небольшие пульты, представленные на Фото 2. В Таблице 1 представлены основные параметры нескольких подобных пультов разработки и производства АО «НТЦ ЭЛИНС».


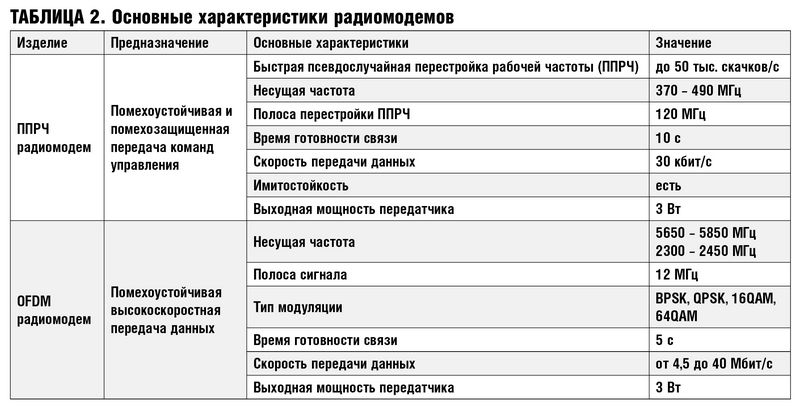
Во-вторых, АО «НТЦ ЭЛИНС» может предложить специализированную радиоприемопередающую аппаратуру, позволяющую обеспечить устойчивую помехозащищенную радиосвязь в пределах прямой видимости, в том числе для передачи видео. Примеры радиоаппаратуры представлены на Фото 4, 5. Их основные технические характеристики приведены в Таблице 2. Отдельно стоит отметить имеющийся опыт и задел АО «НТЦ ЭЛИНС», который позволяет создавать специализированные радиоканалы с возможностью передачи видеопотока высокой четкости (Full HD 1920х1080@60Гц) в режиме реального времени с величиной задержки передачи не более 27 мс за счет применения аппаратного видеокодека h.264 собственной разработки, что чрезвычайно важно для оперативного управления робототехническими комплексами.



В-третьих, это рабочие места операторов (РМО) различной конфигурации, размещаемые как внутри кабины, так и стационарно для дистанционного управления крупными РТК (как правило, по спутниковым каналам связи). Внешний вид РМО в значительной степени зависит от места размещения, возможностей компоновки и требуемого функционала. На Фото 1 представлено РМО для размещения в возимых кузов-контейнерах, предназначенное для управления крупногабаритными БПЛА.
В-четвертых, АО «НТЦ ЭЛИНС» имеет все необходимые лицензии и опыт для разработки и производства средств криптографической защиты информации (СКЗИ). Применение готовых, уже существующих на рынке СКЗИ может быть ограничено предельными массогабаритными показателями РТК. В случае интеграции СКЗИ непосредственно в вычислительные или радиоприемопередающие средства достигается существенное уменьшение массогабаритных показателей системы в целом.
И, наконец, в-пятых, необходимо отметить наличие в АО «НТЦ ЭЛИНС» значительного опыта и большого количества успешно выполненных тем по созданию комплексного программного обеспечения для управления как наземными робототехническими комплексами и их полезной нагрузкой, так и беспилотными летательными аппаратами.
Программисты АО «НТЦ ЭЛИНС» в своей работе применяют в том числе программное моделирование РТК для отработки и проверки правильного функционирования программного обеспечения, что позволяет предоставлять заказчикам качественное ПО с высокой степенью готовности и тем самым минимизировать сроки отладки в составе объекта эксплуатации. А модульная архитектура программного обеспечения позволяет в короткий срок адаптировать программное обеспечение под нужды заказчика и под конкретный тип РТК.
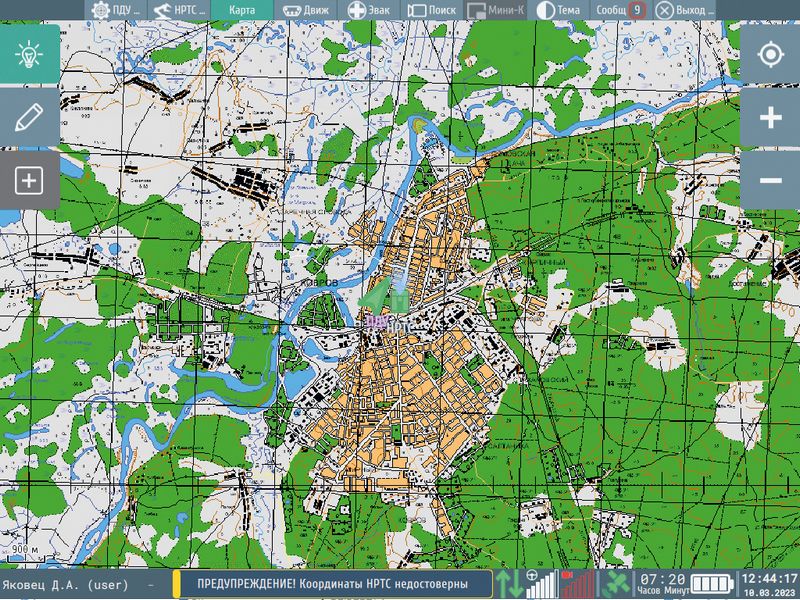
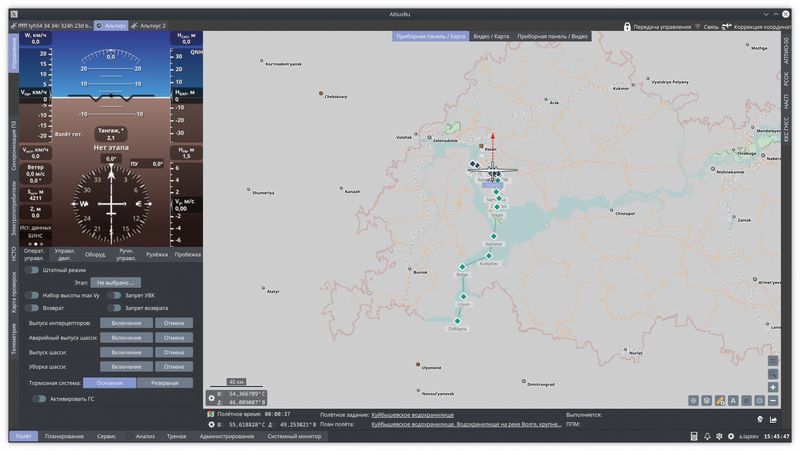
На Фото 6, 7 представлены варианты оконных интерфейсов различного ПО разработки АО «НТЦ ЭЛИНС», предназначенного для управления РТК и БПЛА.

Благодаря широкому охвату технологий и компетенций АО «НТЦ ЭЛИНС» может предоставлять заказчикам широкий и готовый набор технических и программных средств для управления различными видами робототехнических комплексов, а также уверенно выполнять работы по разработке новых сложных изделий под нужды заказчиков.
